科學推展中心地球科學組 / 撰稿:黃愷翊 (科學推展中心特約編輯)
近年來台灣的青花菜因營養價值高受到消費者青睞,種植面積逐年提升,然而受到極端氣候與人力匱乏的影響,導致農業生產力下降和市場價格上升。尤其大型賣場對青花菜的品質與大小要求嚴格,但常因環境與施肥不一而造成青花菜收穫時常有品質與時間差異,若要單株管理則耗費時間和人力,成本因此大增。為了解決此問題,中興大學楊明德教授帶領研究團隊與台中農業改良場合作,運用無人機影像與深度學習科技監測青花菜生長狀況,輔助進行田間管理決策,成功導入智慧農業以降低傳統農業所需的人力及成本,未來可將監測模型配置於採收機,達到自動採收的目標。
導入精準農業提升台灣農業困境
台灣位於亞熱帶地區,雨水豐厚的氣候非常適合農作物栽種,但同時潮濕的環境也帶來了病蟲害。加上少子化影響日漸嚴重,農業生產人力不足成為目前最大的挑戰之一,因此轉型成智慧農業成為當務之急,運用科技協助農業生產人員提升農作決策與管理精準度,可降低生產所需成本。
無人機(Unmanned Aerial Vehicle,簡稱UAV)越來越常被應用在精準農業,相較於衛星影像必須配合其運行週期且拍攝解析度較差,無人機具有快速、方便、低成本的特性,可在較低的高度飛行,有助於取得更加清晰的物體影像,相當適合作為農作物生長的監測工具。目前無人機影像已成功使用於作物分類、雜草檢測和生長監測,證明無人機能協助降低田間管理成本。
運用深度學習建立預測模型,準確監測農作物生長狀況
深度學習技術也是轉型精準農業的一大助力,本研究團隊運用物件偵測(objection detection)和語意分割(semantic segmentation)技術建立預測模型協助監測單株青花菜生長情形。首先,研究團隊先在台中農業改良場兩輪作的青花菜田進行圖像收集,拍攝可見光和多光譜的空拍影像進行影像建模,前者可見光影像提供定位數據,後者多光譜的影像提供深度學習所需的分割數據。模型訓練包含訓練、驗證和測試三個階段,最後再將定位數據與分割數據資料結合,形成青花菜健康植株的分佈圖,包括以坵塊為單位及以單株為單位之植生指標變化、綠覆率變化。
研究團隊以春作的青花菜田影像作為訓練資料,並將其模型用在相同位置的秋冬作青花菜田,比對兩期作物影像資料後,影像回收率和準確率接近於100%,顯示影像預測模型具有良好的敏銳度與精準度。之後,研究團隊又將其預測模型使用在實際青花菜農地,即使青花菜植株的生長情形與訓練資料之農田實際狀況有所不同,無人機影像的辨識率仍達到61%,表示此模型具有良好的敏感度。
運用模型有效提升田間管理決策效率
此研究結果提出了單株青花菜生長影像地圖的預測模型,能夠讓農民遠端監測不同青花菜植株在大片農地的成長狀況,有效觀察田間灌溉施肥不均及病蟲害分佈等情形,達成田間管理可視化與精準度,得以大幅減少巡田所需人力及精準施肥用藥,達到精準農業的目標。除此之外,此模型還能提供田間管理決策依據,讓農民知道最佳青花菜採收時機,未來可將監測模型配置於採收機,可達到自動採收的目標。當然,這套預測模型的機制未來亦能套用在其他農作物上,以增加生產效率並減少人力成本,提升台灣農業的生產與品質,並達到永續農業之願景。
參考文獻
Cheng-Ju Lee, Ming-Der Yang(楊明德)*, Hsin-Hung Tseng, Yu-Chun Hsu, Yu Sung, Wei-Ling Chen. (2023). Single-Plant Broccoli Growth Monitoring Using Deep Learning with Uav Imagery. Computers and Electronics in Agriculture, Vol. 207, No. 107739. https://doi.org/10.1016/j.compag.2023.107739
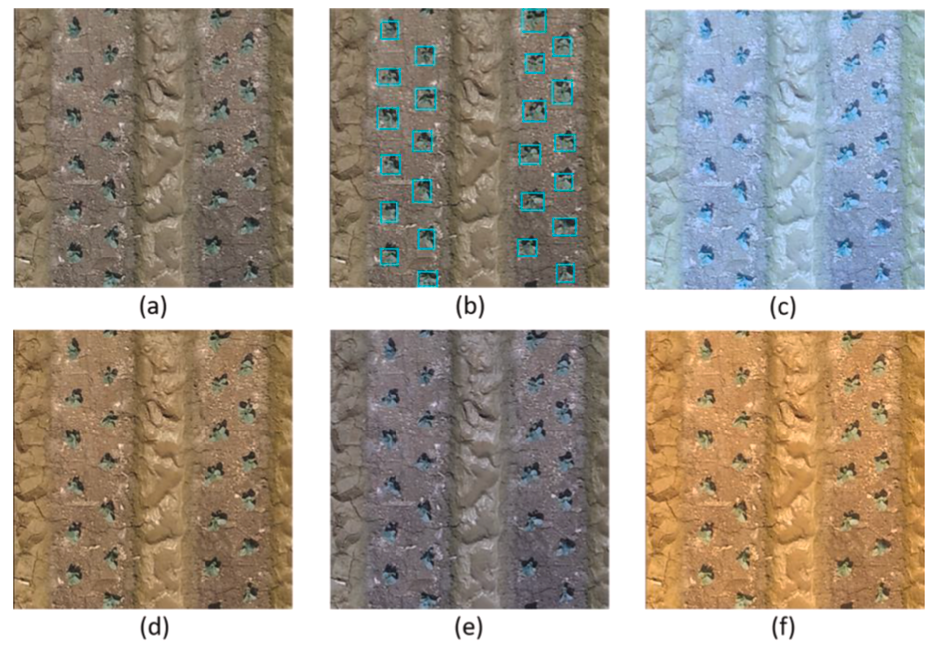
圖說:圖2青花菜辨識及定位示意圖:(a)原始影像 (b)帶有框線的原始影像 (c)~(f) 以不同白平衡和亮度擴增資料。
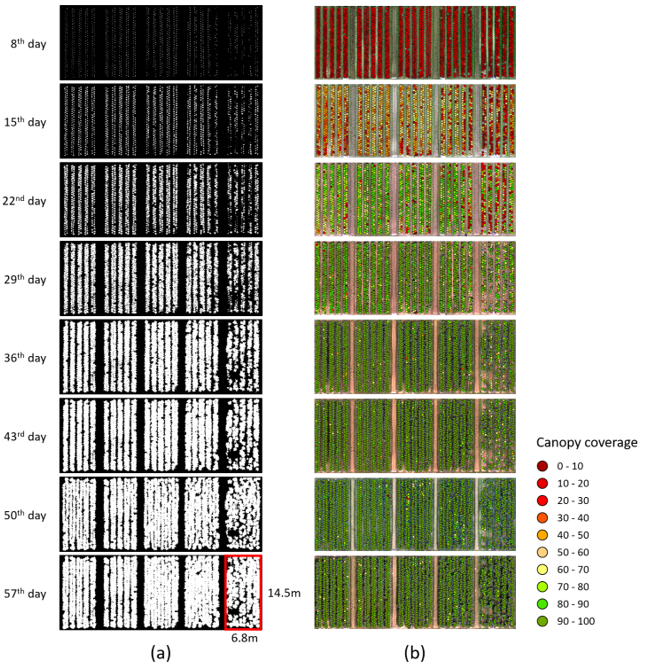
圖說:圖3青花菜生長監測:(a)以坵塊為單位之綠覆率變化 (b)以單株為單位之綠覆率變化。
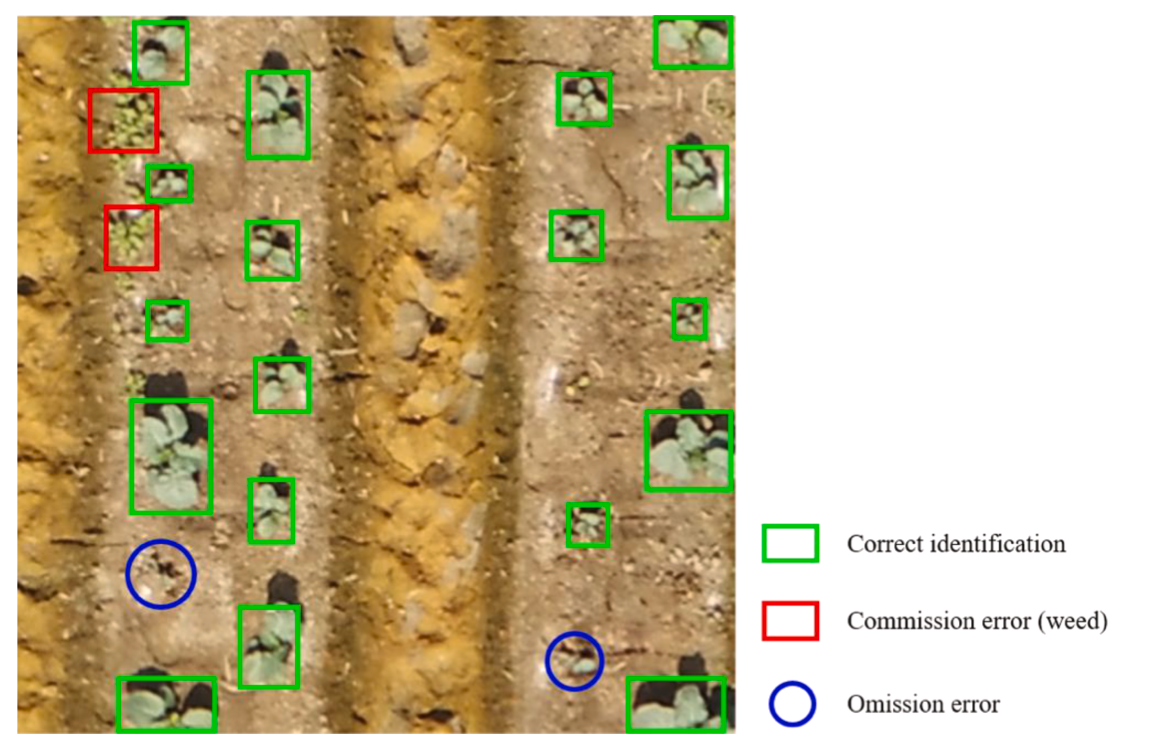
圖說:圖4藍色園圈處:生長異常緩慢的青花菜造成的漏檢錯誤。紅色方框處:因雜草造成的誤檢錯誤。
照片圖說:圖1青花菜田
轉貼新聞:https://spec.ntu.edu.tw/20230601-research-earth/