稿源:2018-12-14/物聯網/廖家宜
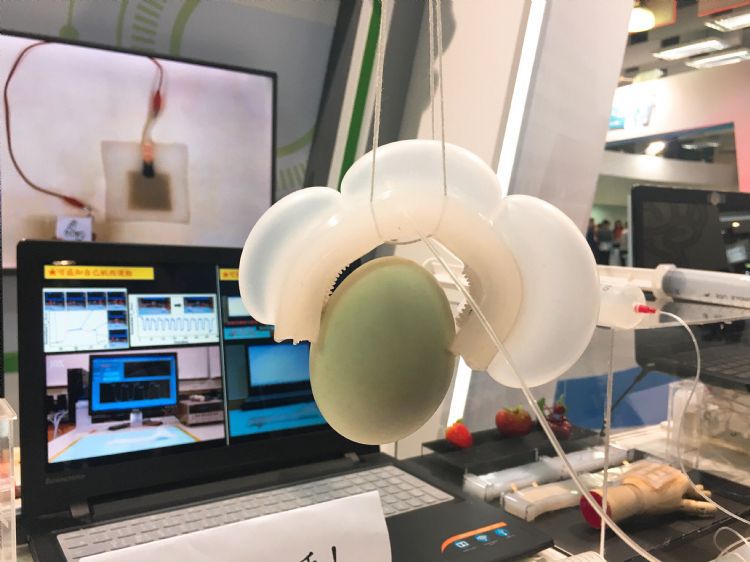
機器手臂至今尚未能完全取代人類的原因之一,在於其還未能全面達到人類作業的水準,特別是由於其堅硬的外殼限縮應用範圍,一般生產線上較為脆弱的物件難以透過機器手臂進行抓取的動作。針對機器人應用的弱點,中興大學研究團隊則是研發一款具有自主感測功能的軟性機器人,質地仿人類皮膚具有柔軟、可揉彎的特性,而它的感知能力甚至不需靠電池驅動就能運作
在生產線上導入機器手臂是工業4.0發展的必然趨勢,但現今工廠內的機器人尚未能完全取代人力的原因之一,是在於機器手臂至今尚未能與人類一樣擁有完整的感知能力,無法完全「複製」人類的作業能力,例如精度不足便無法將其應用在極為精密的組裝作業中。然而,精度不足只是箇中原因之一,機器手臂堅硬的外殼也侷限其應用在脆弱物件的可能性。
例如食品生產線中的食材不像汽車工業的金屬零件可承受外力,一般在食品生產線上單透過機械手臂組裝的難度較高。中興大學材料科學與工程學系助理教授賴盈至表示,有別於現在市場上機器人堅硬的外殼與肢體動作,仿人類皮膚的軟性機器人最大的特色就是像人類一樣擁有皮膚的感知能力,除了柔軟的皮膚可以保護被夾取的物料表面外,透過感測器還能主動感知外在刺激並即時做出反應。
賴盈至表示,依據終端需求,主動式感知機器人透過不同的感測器也衍生出不同場景的應用,例如運用在生產線上透過壓力感測可偵測夾取物品掉落的意外;透過溫濕度感測甚至可運用在家用服務型機器人,用以檢查嬰兒尿布濕度,避免人手碰觸的衛生疑慮。而更特別的是,由於主動式感覺皮膚可偵測非常微小的人體生理訊號,因此也可用於脈搏量測或透過機器人觸診。
賴盈至指出,這款軟性機器人的設計靈感其實來自於「杯麵機器人」。研究團隊以矽膠為原料,包覆可伸縮的奈米導電材料當作感測皮膚,利用靜電原理就能讓軟性機器人產生電訊號而不需要電池即可驅動,此舉也將機器人的功耗降至最低。
仿生軟性機器人是近年市場新興應用,在視覺已被機器人大量應用的市場中,可望再度突破傳統機器人的設計思維,而結合感測功能更可大幅擴大各類智慧機械的應用。此外,透過靜電原理大幅降低功耗的特性,未來還可將這項技術延伸至為穿戴電子、軟性電子、個人電子裝置等提供電能,驅使電子產品具備更佳的功耗表現。
因應未來科技趨勢,中興大學研究團隊今年也在由科技部主辦的「未來科技展」中以AI智慧應用與電子、光電展區中亮相。軟性機器人可改善傳統機器人柔性不足的痛點,未來就看機器人製造商會如何加強觸覺技術,讓機器人的作業能力比肩人類。
照片圖說:仿人類皮膚的軟性機器人可輕易抓取脆弱的雞蛋。廖家宜攝