生態農業:農業地景生態監測及復育【土木工程學系/楊明德特聘教授】
| 論文篇名 | 英文:Geometric Recognition of Moving Objects in Monocular Rotating Imagery Using Faster R-CNN 中文:快速R-CNN於單眼旋轉影像中移動目標幾何辨識 |
| 期刊名稱 | REMOTE SENSING |
| 發表年份,卷數,起迄頁數 | 2020, 12 (12),1908 |
| 作者 | Chuang, Tzu-Yi; Han, Jen-Yu; Jhan, Deng-Jie; Yang, Ming-Der(楊明德)* |
| DOI | 10.3390/rs12121908 |
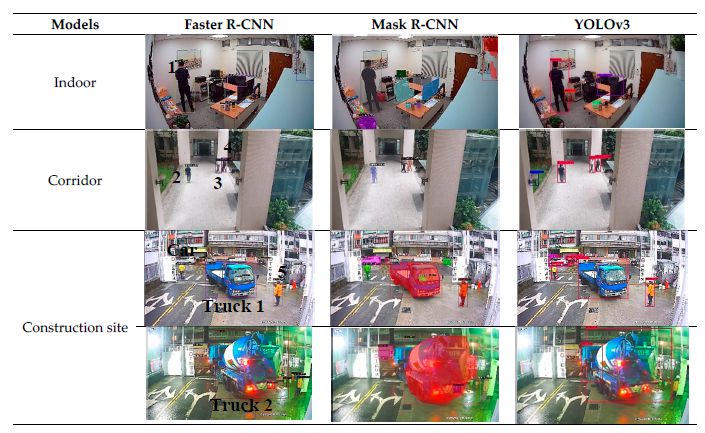
| 中文摘要 | 各領域已經廣泛發展從序列影像進行移動目標檢測和追踪。然而,觀察幾何屬性並識別檢測目標,以進一步研究運動行為較少獲關注。本研究重點是使用單眼相機來確定運動軌跡,物體高度和目標識別。本文使用具有固定區域和旋轉泛傾斜縮放(PTZ)攝像頭的近距離攝影測量法,使用區域快速卷積神經網絡(Faster R-CNN)進行三維運動目標識別。首先,須消除攝像機的移動影響,以檢測包含實際運動的目標,然後採用運動物體識別辨認目標類別其幾何屬性,以進一步助於目標移動行為研究。為了定量評估方法有效性,首先進行室內合成環境的實驗,然後,應用於室外實際環境,並基於召回率、精度和F1指數評估可行性。實驗結果驗證該方法在實驗室和實際環境中都具有效性,可以非常低的成本透過現有PTZ攝像機影像,以計算移動目標(包括行人和車輛)的高度和速度,且具可接受的誤差和應用潛力。 |
| 英文摘要 | Moving object detection and tracking from image sequences has been extensively studied in a variety of fields. Nevertheless, observing geometric attributes and identifying the detected objects for further investigation of moving behavior has drawn less attention. The focus of this study is to determine moving trajectories, object heights, and object recognition using a monocular camera configuration. This paper presents a scheme to conduct moving object recognition with three-dimensional (3D) observation using faster region-based convolutional neural network (Faster R-CNN) with a stationary and rotating Pan Tilt Zoom (PTZ) camera and close-range photogrammetry. The camera motion effects are first eliminated to detect objects that contain actual movement, and a moving object recognition process is employed to recognize the object classes and to facilitate the estimation of their geometric attributes. Thus, this information can further contribute to the investigation of object moving behavior. To evaluate the effectiveness of the proposed scheme quantitatively, first, an experiment with indoor synthetic configuration is conducted, then, outdoor real-life data are used to verify the feasibility based on recall, precision, and F1 index. The experiments have shown promising results and have verified the effectiveness of the proposed method in both laboratory and real environments. The proposed approach calculates the height and speed estimates of the recognized moving objects, including pedestrians and vehicles, and shows promising results with acceptable errors and application potential through existing PTZ camera images at a very low cost. |
Figure. Results of object detection using various models in di erent scenarios.